Fundamentals of Linear Control:
A Concise Approach
Chapter 1: Introduction
linearcontrol.info/fundamentals
1.1 Models and Experiments
Block diagram
- Input: \(u\)
- Output: \(y\)
- System: \(G\)
A simple static model of a car
- Input: pedal excursion, in inches
- Output: terminal velocity, in mph
- System: a car and the experimental conditions
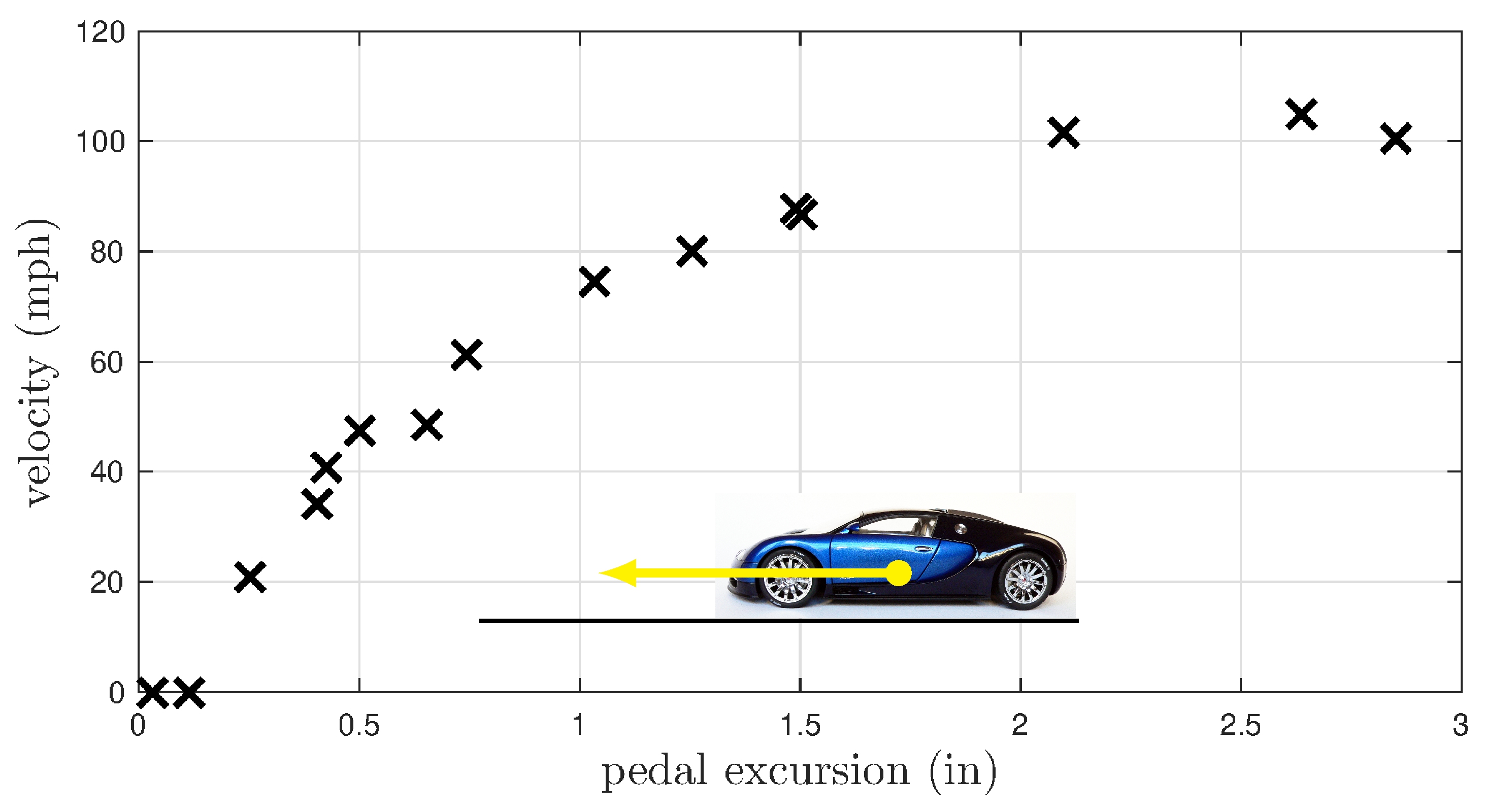
A simple static model of a car
Mathematical models
Curve fitting: \(y = \alpha \tan^{-1}(\beta u)\) (nonlinear)
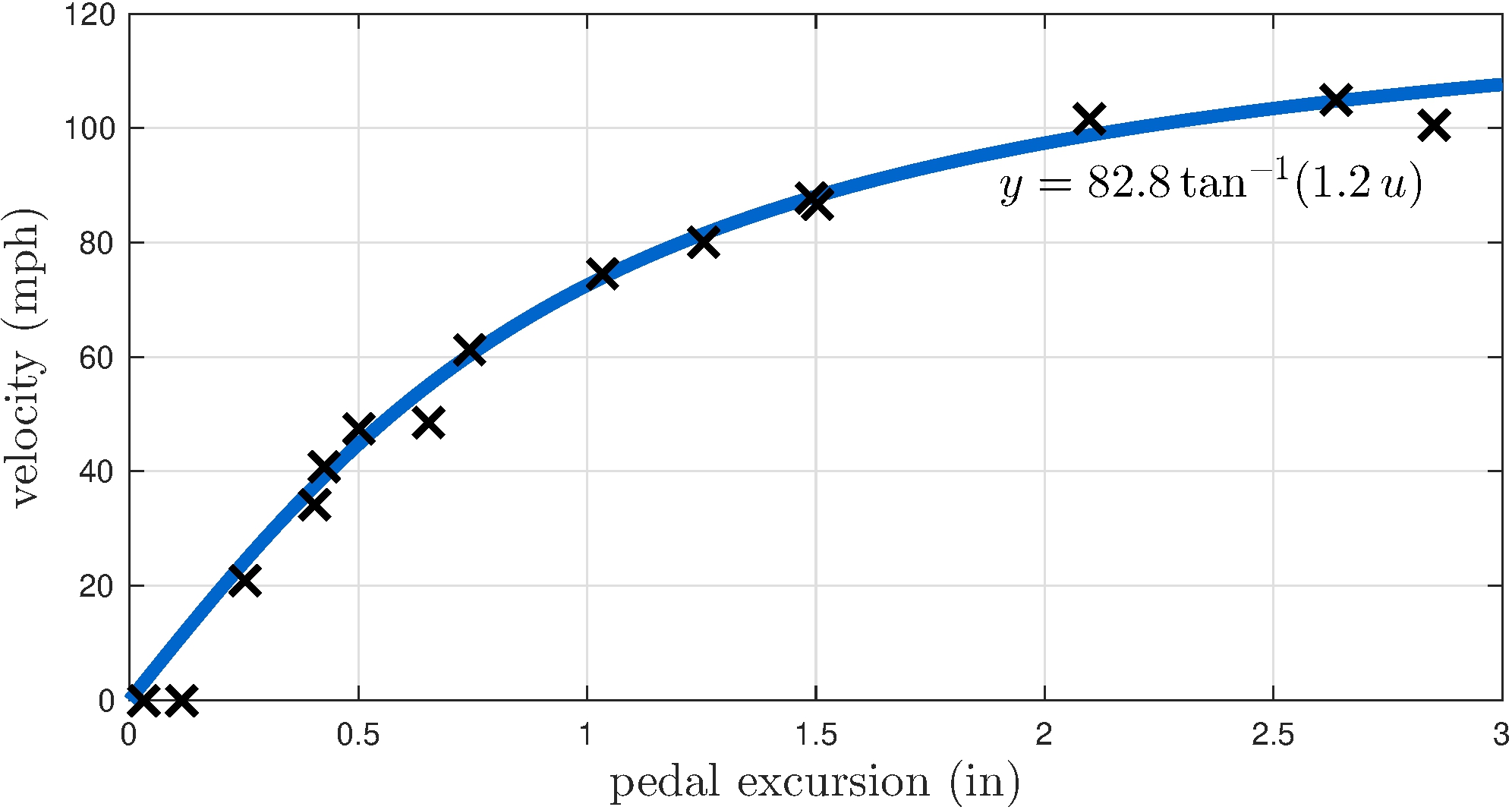
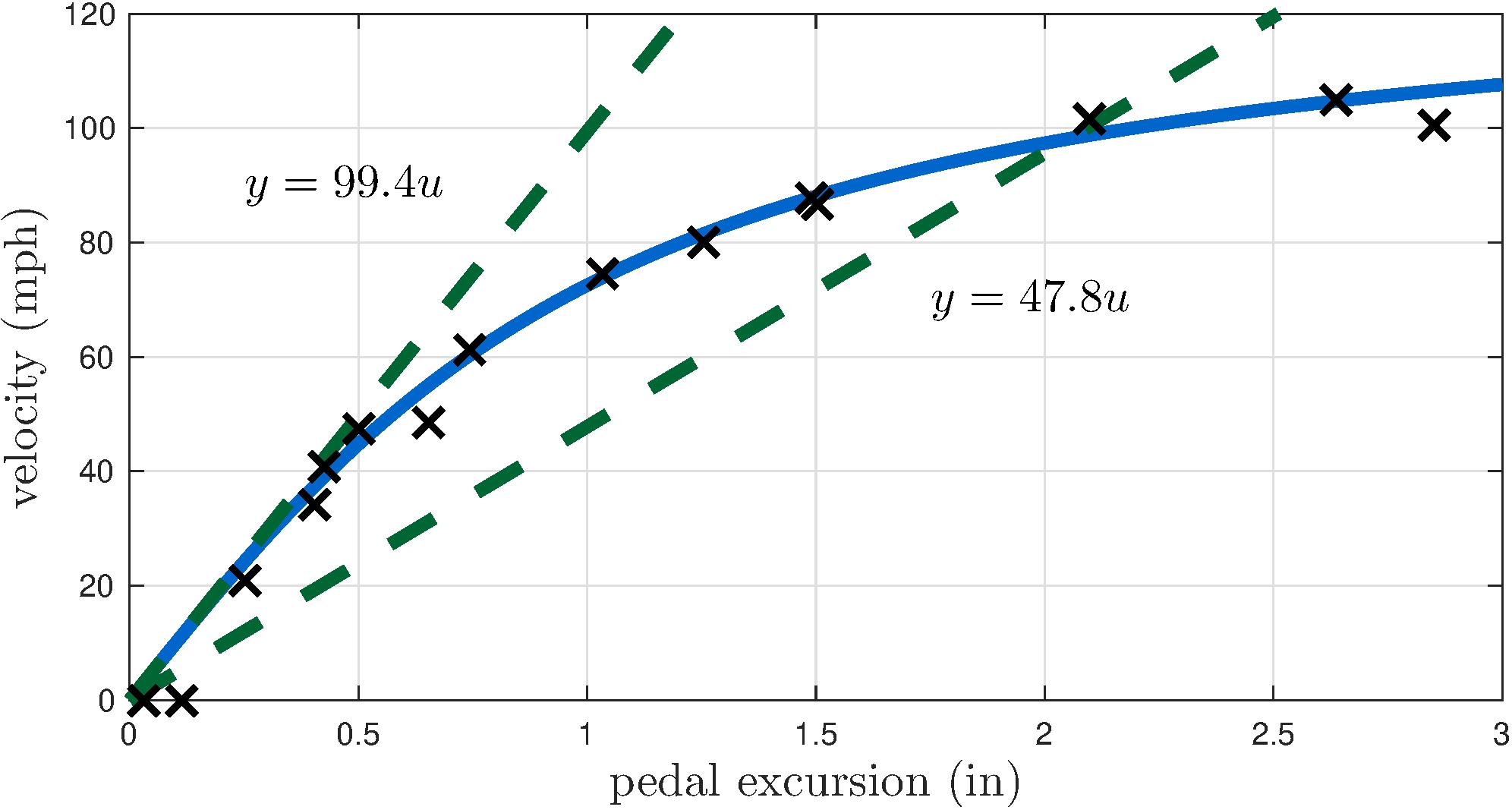
A simple static model of a car
Mathematical models
Curve fitting: \(y = \gamma u\) (linear)
1.4 Solution without Feedback

System model
\[\begin{align*} y &= G(u) \end{align*}\]
Open-loop controller
\[\begin{align*} u &= K(\bar{y}) \end{align*}\]
Solution
\[\begin{align*} K = G^{-1} \end{align*}\]
Controller is a function of the model
Uncertainty in the model increases uncertainty in the solution
1.5 Solution with Feedback
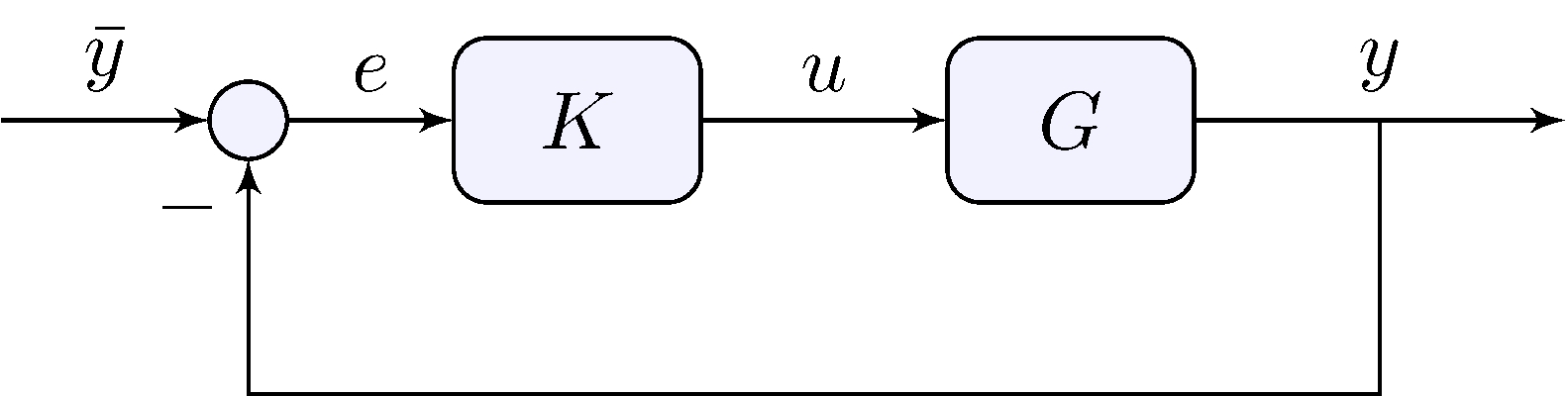
System model
\[\begin{align*} y &= G(u) \end{align*}\]
Feedback controller
\[\begin{align*} u &= K(\bar{y}, y) \end{align*}\]
Most common feedback controller
\[\begin{align*} u &= K(e), & e &= \bar{y} - y \end{align*}\]
Solution with Feedback
Feedback analysis in the linear case
\[\begin{align*} y &= G \, u, & u &= K \, e, & e &= \bar{y} - y \end{align*}\] Eliminate \(e\) and \(u\): \[\begin{align*} y &= G K e = G K (\bar{y} - y) & &\implies & (1 + G K) y &= G K \bar{y} \end{align*}\] If \(G K \neq 1\) \[\begin{align*} y &= H \bar{y}, & H &= \frac{G K}{1 + G K} \end{align*}\]
Effect of \(G\), \(K\) on \(H\)
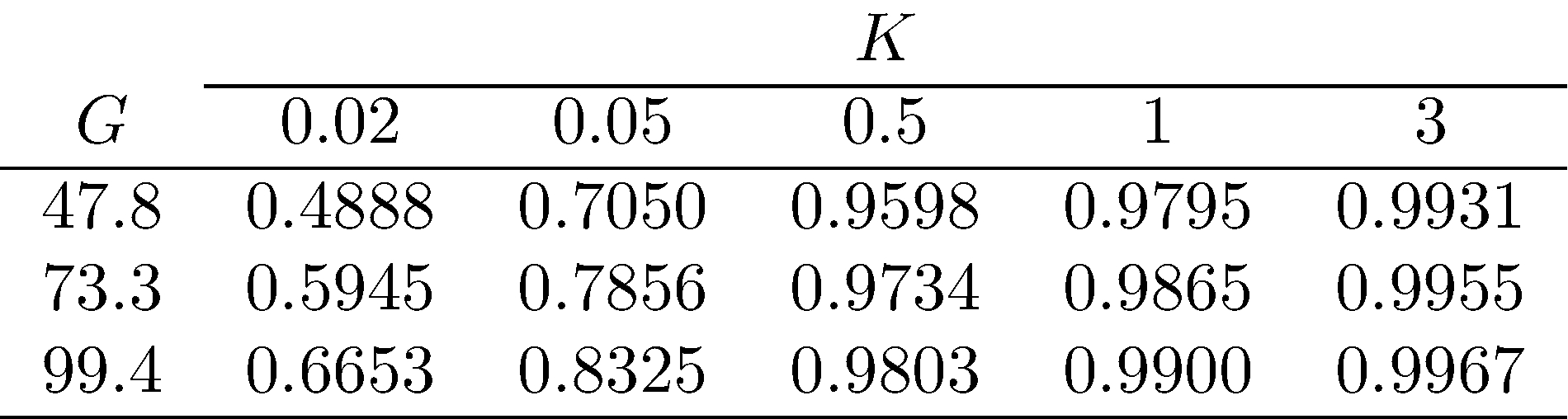
\(K = 0.5\) is already “large”
Value of \(H\) remain close to \(1\) even if \(G\) varies widely
Similar conclusions in the presence of “mild” nonlinearities
1.7 Disturbances
Disturbances
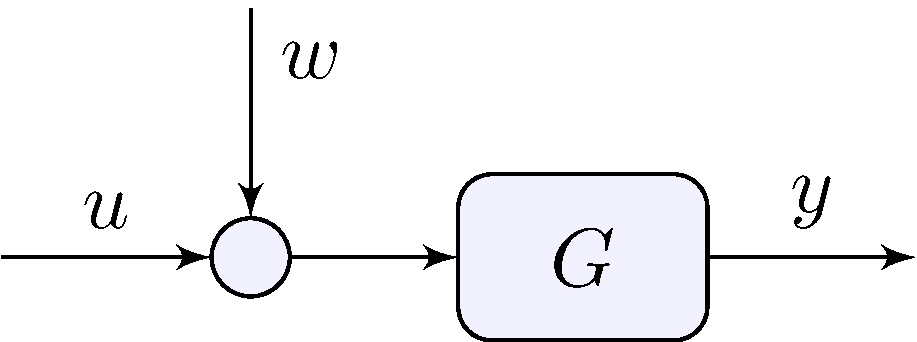
Input disturbance
\[\begin{align*} y &= G (u + w) \end{align*}\]
Disturbances
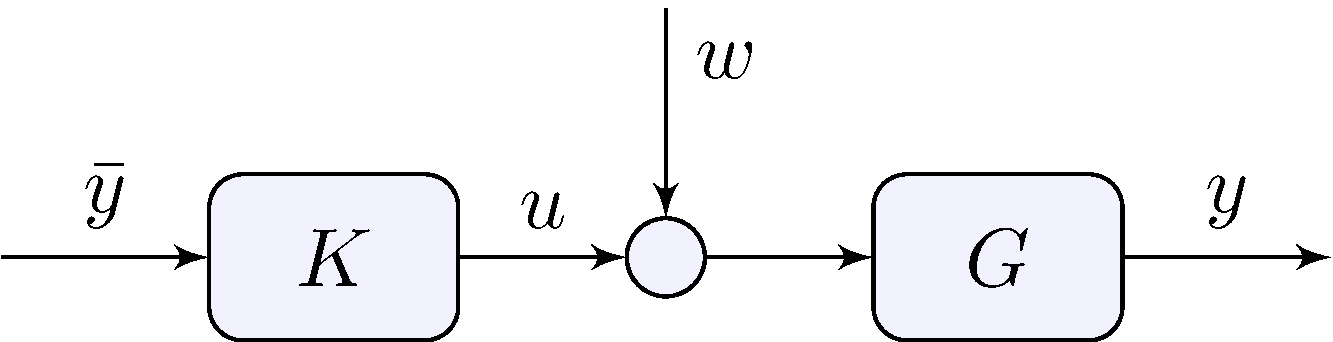
Open-loop
\[\begin{align*} e &= \bar{y} - y = \bar{y} - G (K \bar{y} + w) = (1 - G K) \bar{y} - G w \end{align*}\] If \(K = G^{-1}\) \[\begin{align*} e &= - G w \end{align*}\]
Open-loop system cannot reject disturbance
Disturbances
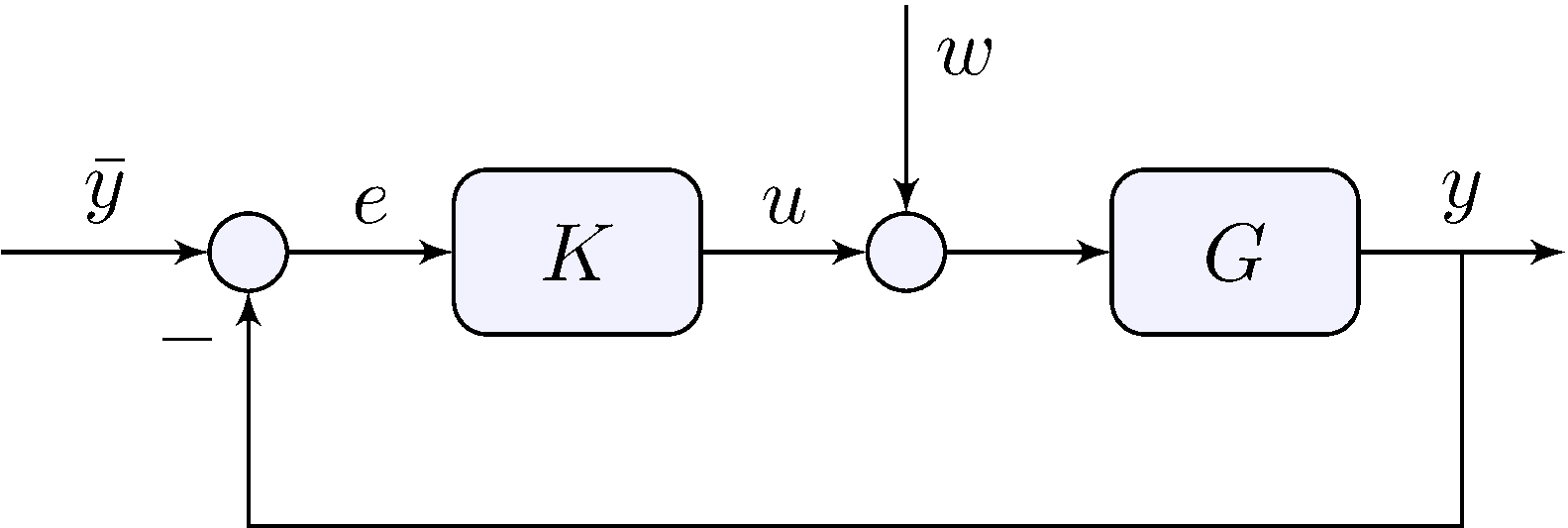
Closed-loop
\[\begin{align*} e &= \frac{1}{1 + G K} \, \bar{y} - \frac{G}{1 + G K} \, w \end{align*}\]
\(K\) large makes both terms small
Feedback simultaneously tracks reference and rejects disturbances