Fundamentals of Linear Control:
A Concise Approach
Chapter 2: Dynamic Systems
linearcontrol.info/fundamentals
2.1 Dynamic Models
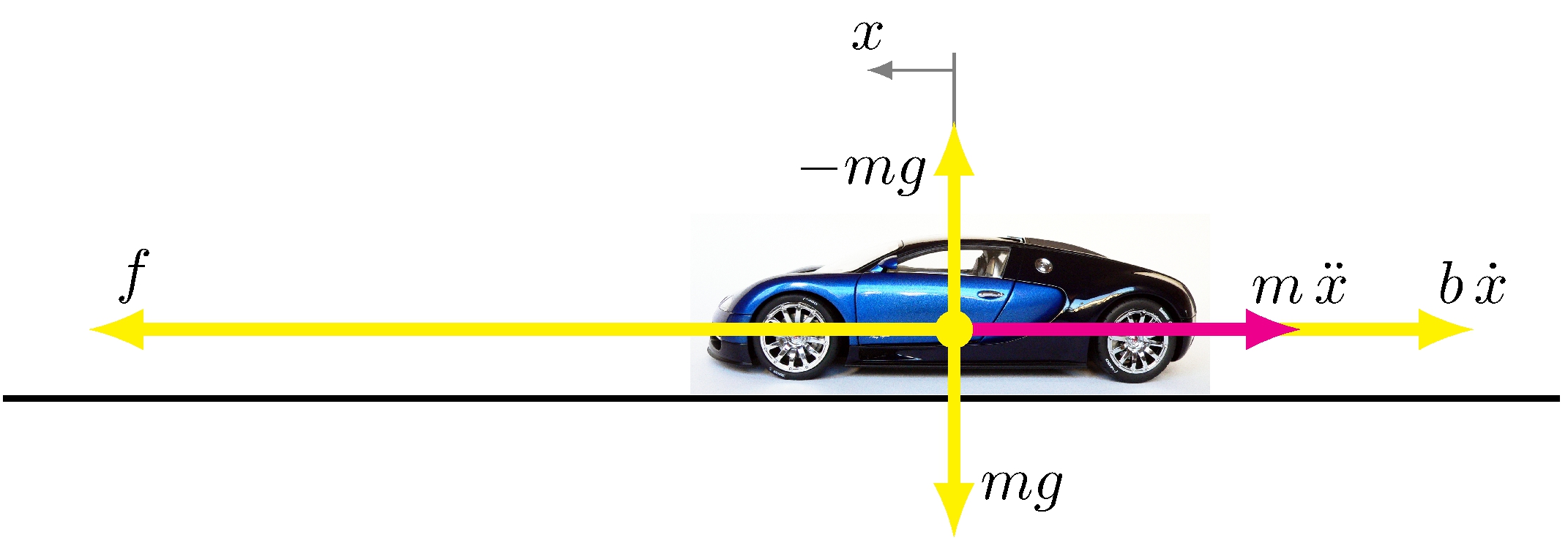
Longitudinal car model
Newton’s law
\[\begin{align*} m \, \dot{v}(t) + b \, v(t) = f(t) \end{align*}\]
Force model
\[\begin{align*} f(t) &= p \, u(t) \end{align*}\]
Ordinary differential equation
\[\begin{align*} \dot{y}(t) + \frac{b}{m} \, y(t) = \frac{p}{m} u(t) \end{align*}\]
- input: \(u\) is pedal excursion in inches
- output: \(y\) is car velocity in mph
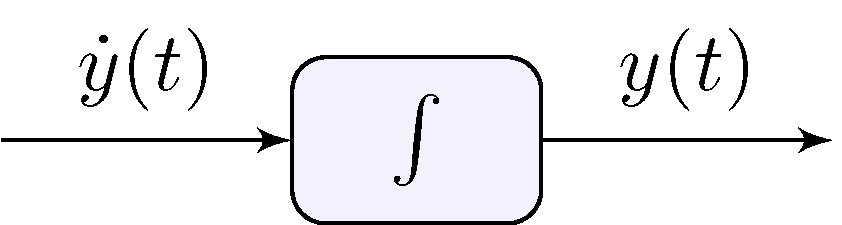
2.2 Block-Diagrams for Differential Equations
Basic element: integrator
Longitudinal car model
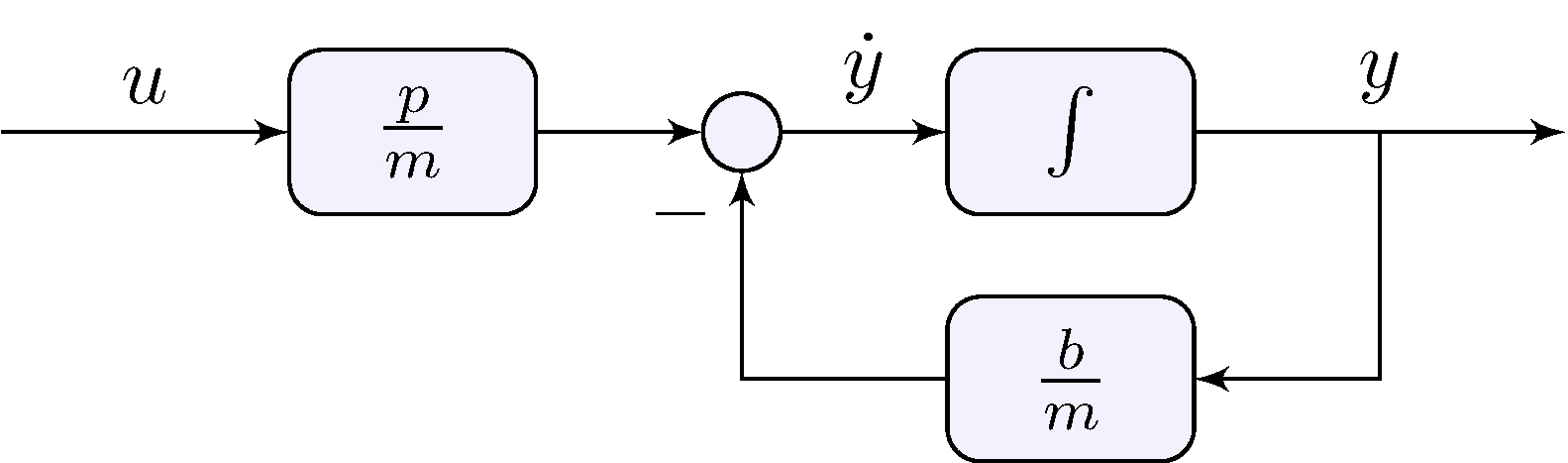
\[\begin{align*} \dot{y}(t) &= \frac{p}{m} u(t) - \frac{b}{m} \, y(t) \end{align*}\]
Note the presence of feedback!
Examples
\[\begin{align*} y(t) &= \tilde{y} \left (1 - e^{\lambda t} \right ) + y_0 \, e^{\lambda t}, & \tilde{y} &= 1 \end{align*}\]

2.4 Experimental Dynamic Response
Experiment
Zero initial velocity
Constant pedal excursion: \(\tilde{u} = 1\) in
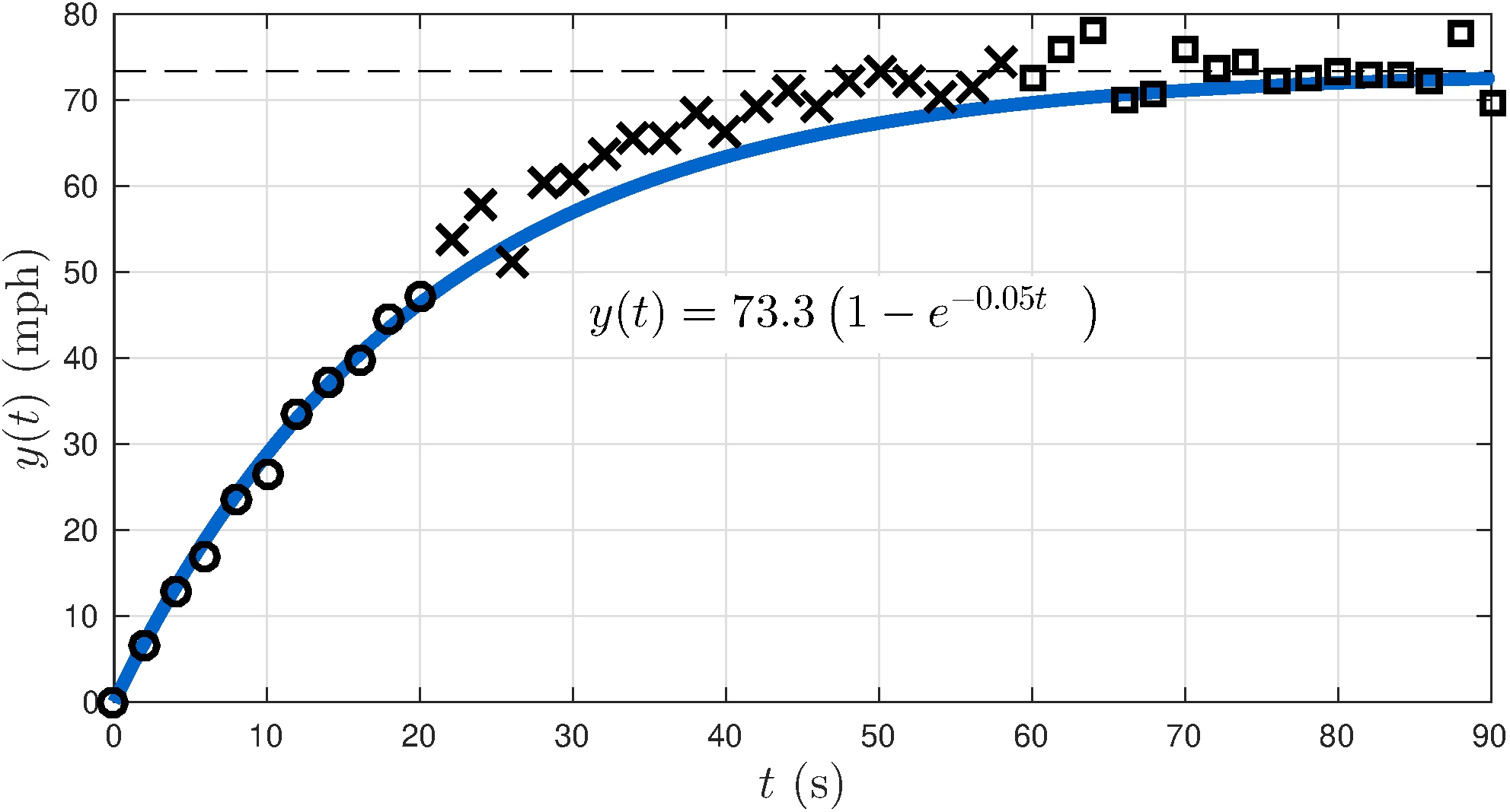
Model fitting
Squares: steady-state solution \(\implies \tilde{y} \approx 73.3 \text{ mph}\)
Model fitting
\[\begin{align*} r(t) &= 1 - \left. y(t) \middle/ \tilde{y} \right . = e^{\lambda t} & & \implies & \ln r(t) &= \lambda t \end{align*}\]
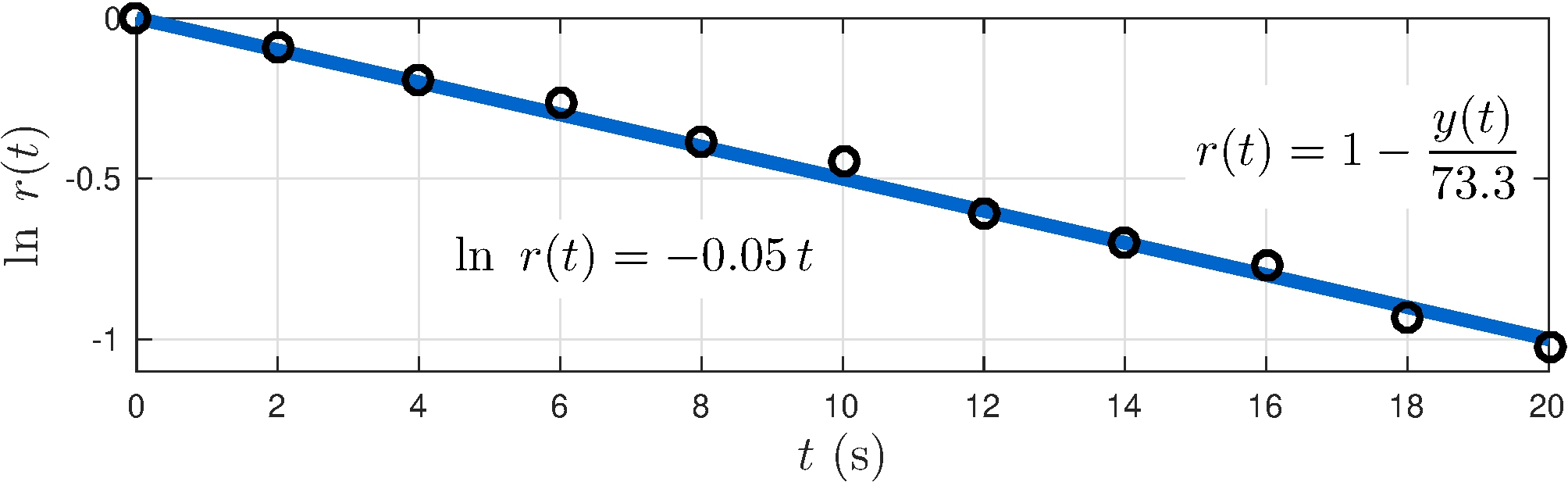
Circles: \(\lambda \approx -0.05 \text{ s}^{-1}\)
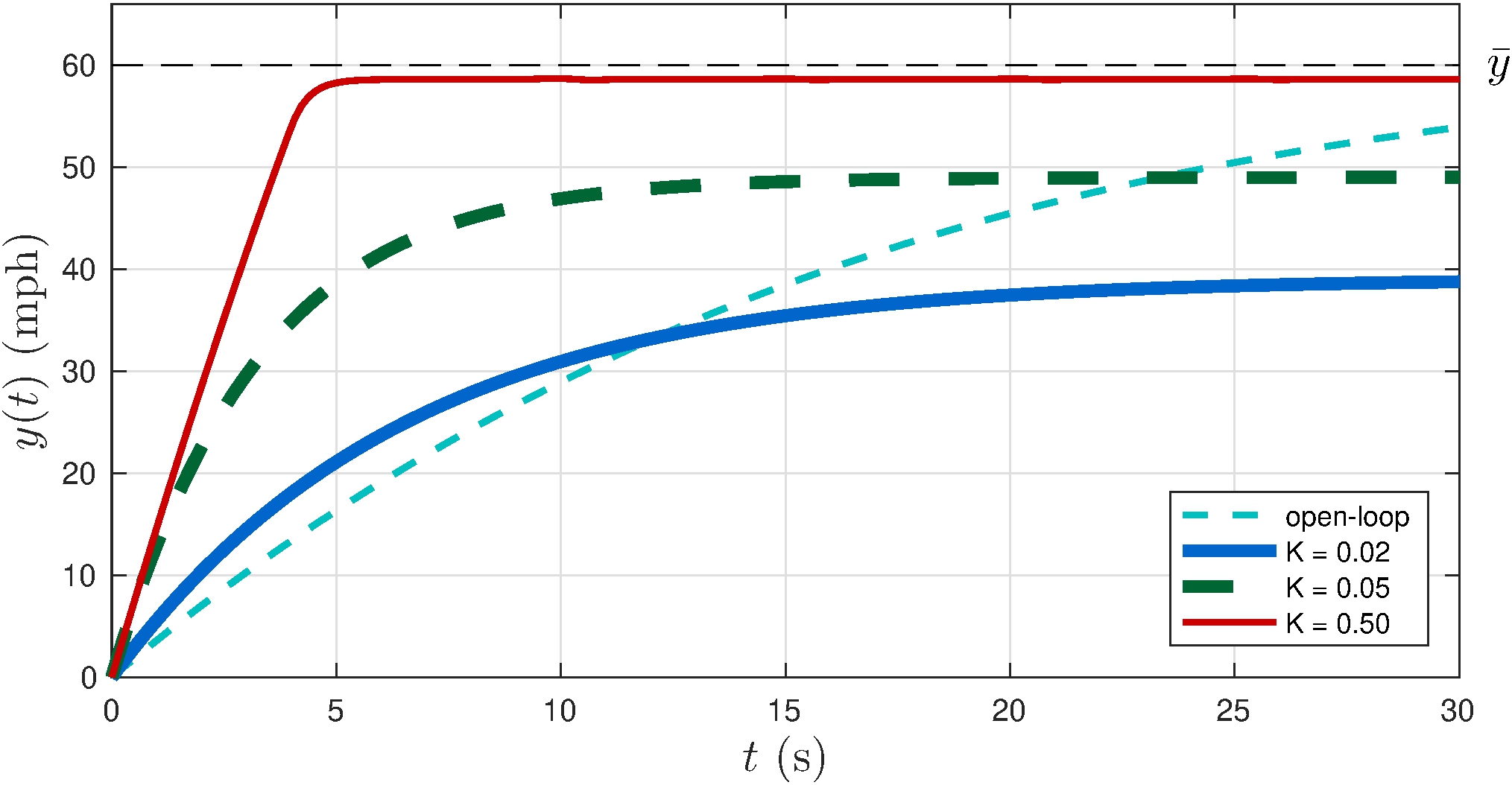
Output
Control
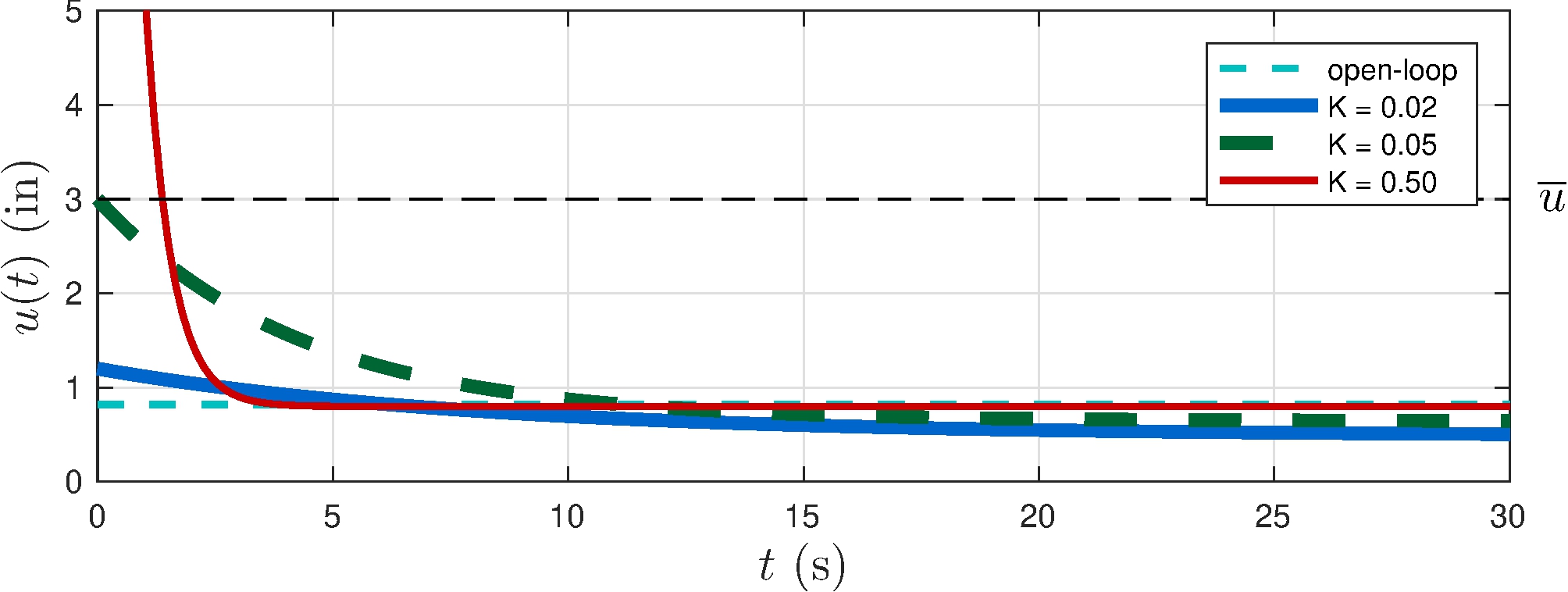
Largest control at \(t = 0\)
\[\begin{align*} u(0) = K e(0) = K (\bar{y} - y(0)) = K \, \bar{y} \end{align*}\]
Saturation
\(\bar{y} = 60 \text{ mph } \implies u(t) > \bar{u} = 3 \text{ in for } K > 0.05\)!
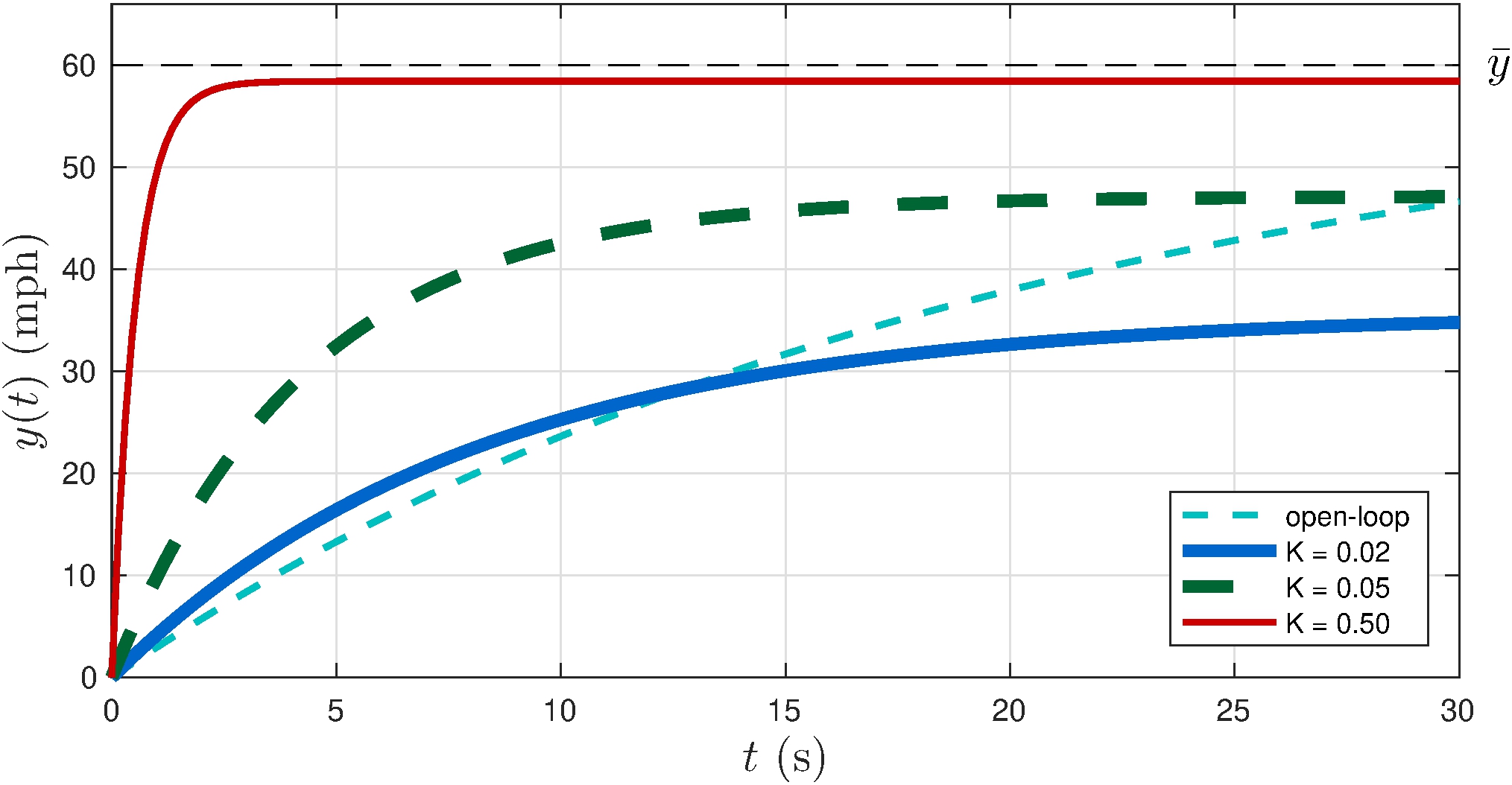
Steady-state
\[\begin{align*} \lim_{t \rightarrow \infty} y(t) &= \tilde{y} = H(0) \, \bar{y}, & H(0) &= \frac{\frac{p}{b} K}{1 + \frac{p}{b} K} \\ \lim_{t \rightarrow \infty} e(t) &= \bar{y} - \tilde{y} = S(0) \, \bar{y}, & S(0) &= \frac{1}{1 + \frac{p}{b} K} \end{align*}\]
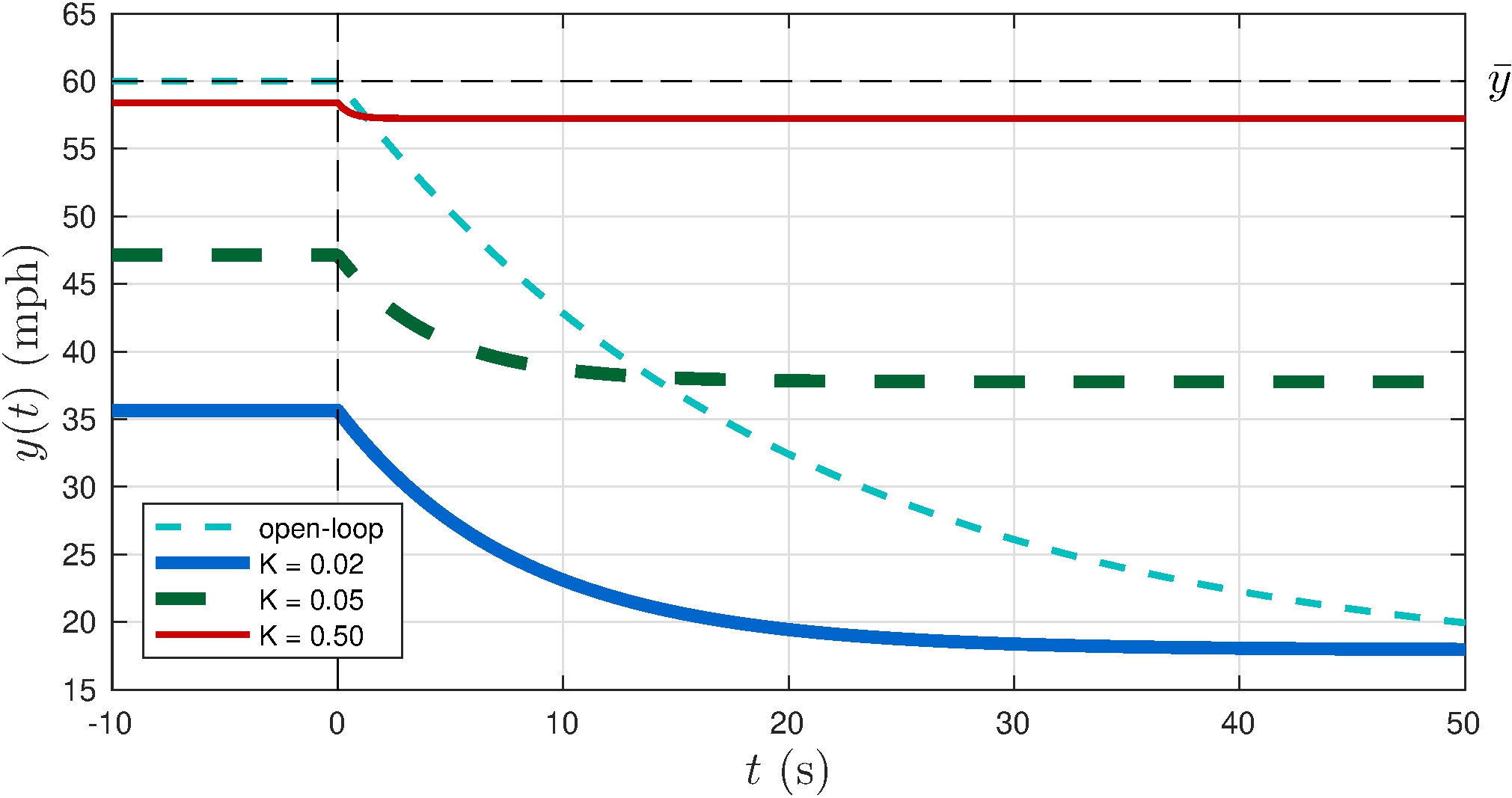
Effect of the gain

\(\bar{y} = 60 \text{ mph}\)
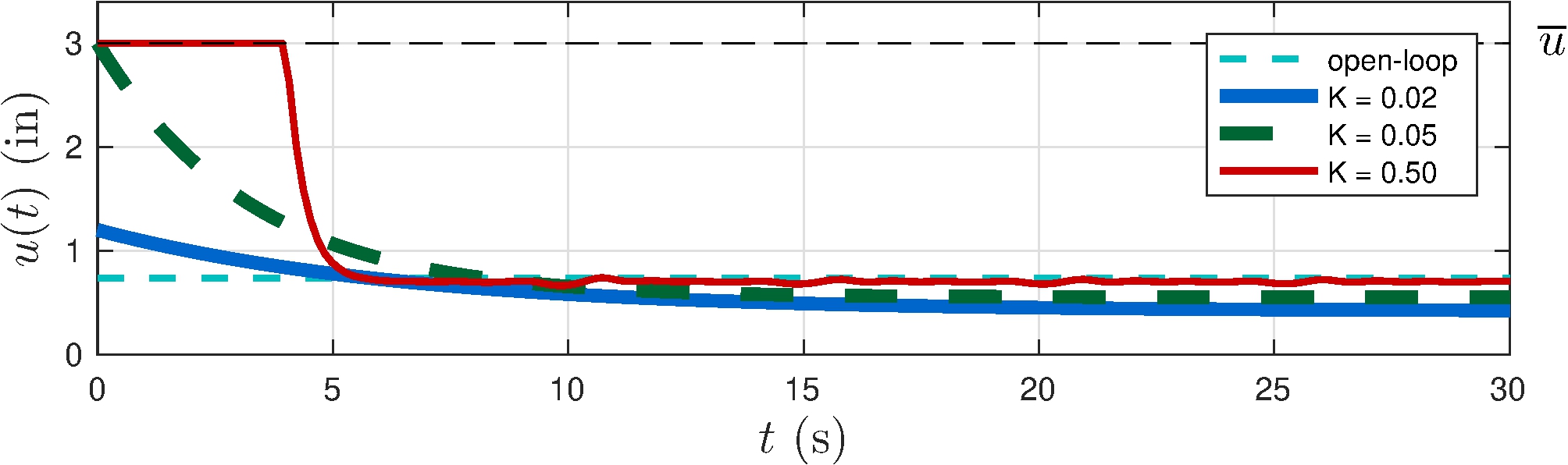
2.6 Nonlinear Models
Output is rate-limited
Control saturates
2.7 Disturbance Rejection
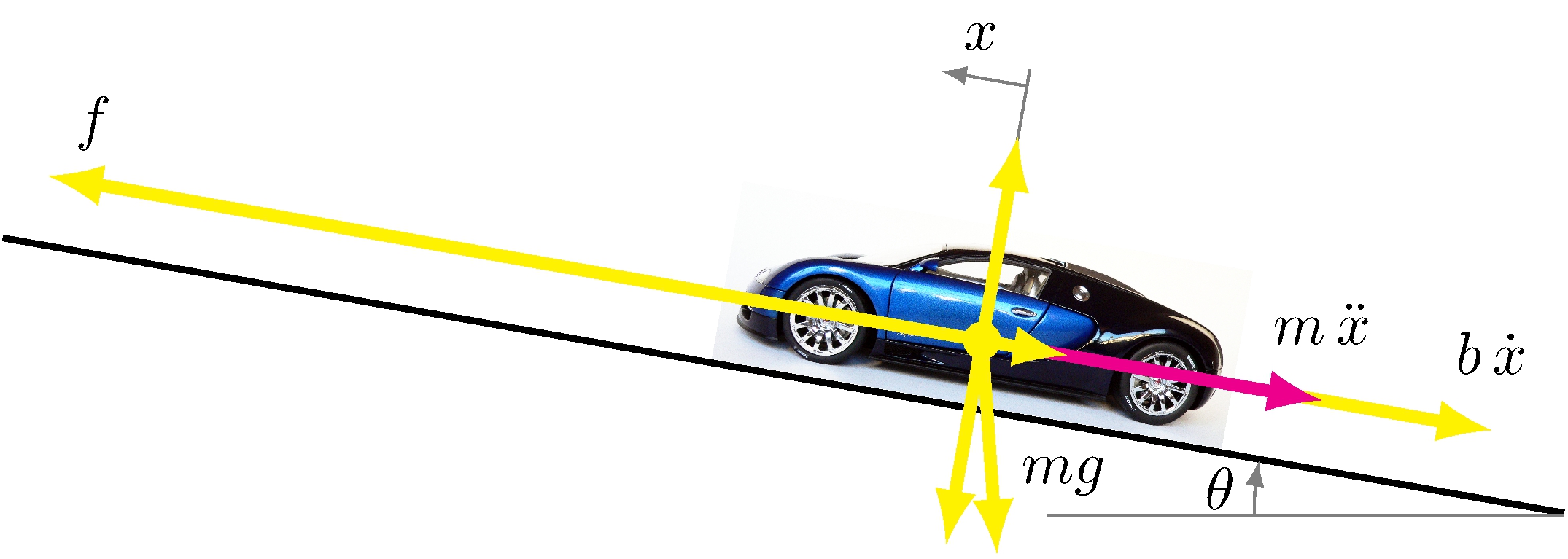
Car on inclined plane model
\[\begin{align*} \dot{y}(t) + \frac{b}{m} \, y(t) = \frac{p}{m} u(t) - g \sin (\theta(t)) \end{align*}\]
Disturbance Model
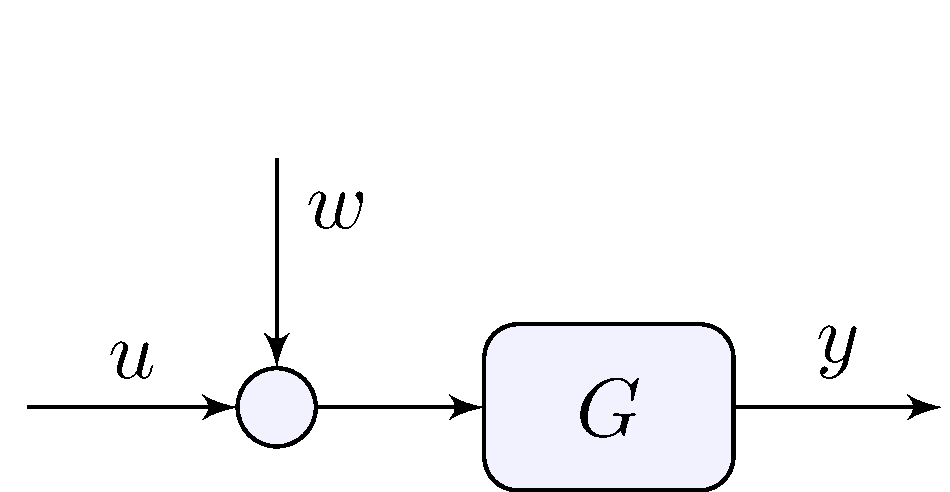
Car on inclined plane with disturbance
\[\begin{align*} \dot{y}(t) + \frac{b}{m} \, y(t) &= \frac{p}{m} \left ( u(t) + w(t) \right ), & w(t) &= - \frac{m g}{p} \sin(\theta(t)) \end{align*}\]
Output
2.8 Integral Action
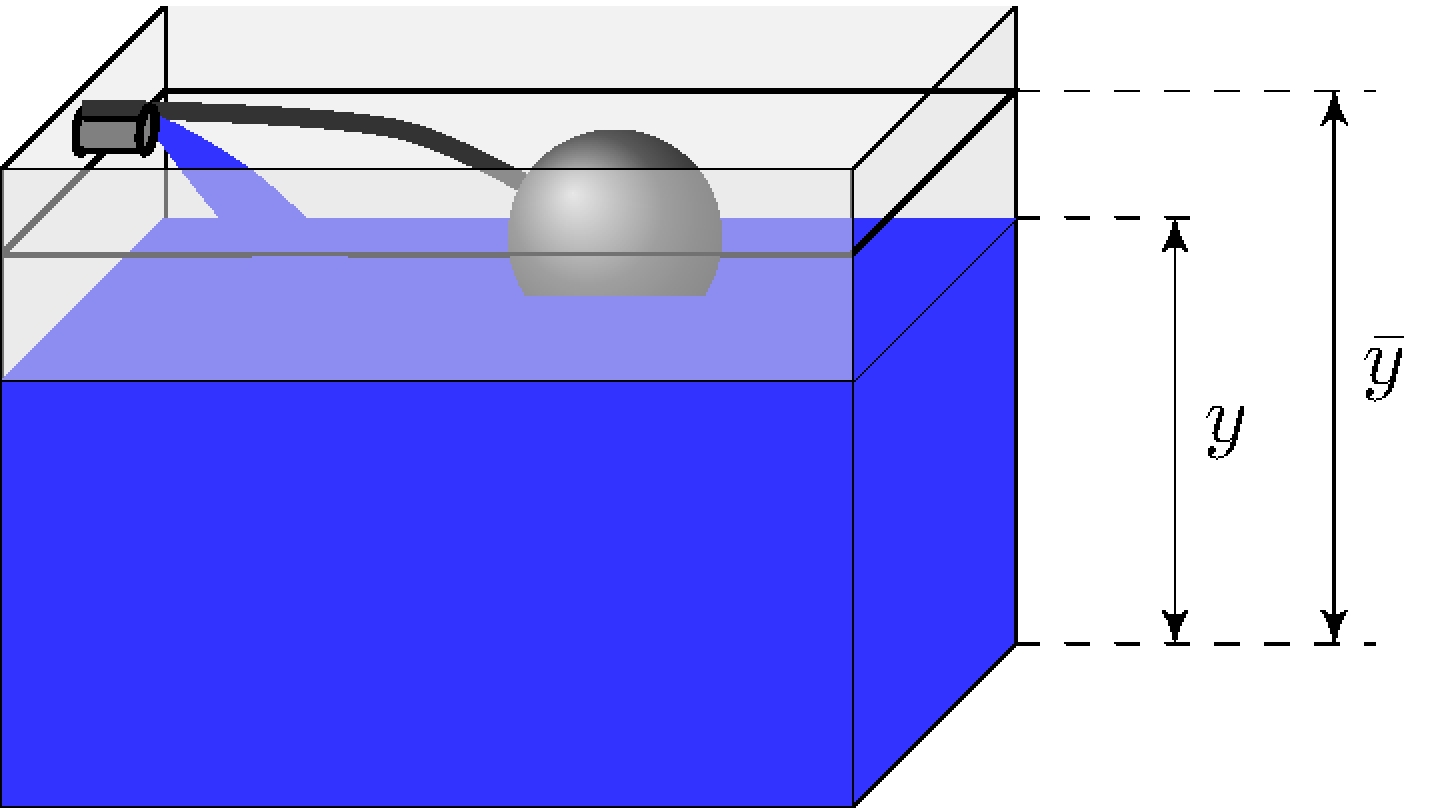
Toilet tank model
\[\begin{align*} \dot{y}(t) &= \frac{1}{A} u(t) \end{align*}\]
Ballcock valve
\[\begin{align*} u(t) &= K(\bar{y} - y) \end{align*}\]
Closed-loop model
\[\begin{align*} \dot{y}(t) + \frac{K}{A} y(t) &= \frac{K}{A} \bar{y}(t) \end{align*}\]